В повечето съвременни механични системи се използва електрическо задвижване за осигуряване на взаимно движение на възлите. Това естествено повдига въпроса за правилното свързване на електродвигателя. В тази статия ще се опитаме накратко да разгледаме класическите варианти на включване на възли на 380 и 220 V, вериги за свързване на намотки на възбуждане, използване на стартер, инхибиране на включването, работа в системата TN-S, както и отделни специфични случаи.
Класификация на двигателите
Класификацията на машините обикновено разграничава две големи групи, различни от вида на електрическия ток, използван за мощност: DC и AC двигатели.
Първата група е разделена на следните видове:
- Колектор. Клас машини, при които веригата на ротора и статора е заключена благодарениечетка за събиране на четки (SHCHU). Такива се използват например в бормашина, а самата шахта е най-слабата строителна площадка. Двигателите от тази група също са разделени на двигатели с независимо и самовъзбуждане (паралелни, последователни, смесени);
- Безплатно. Както следва от наименованието, в автомобили от този тип няма проблем SHCHU, а организацията на веригата се осъществява с помощта на електронни ключове и сензора за положение на ротора.
Принципната разлика между тези два вида DC двигатели може да се види на фигурата:
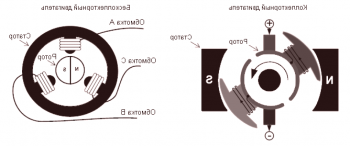
Различия в колекторния двигател от преградата
\ tПри отсъствието на вал, във втория вариант намотките се намират на полюсите на статора, а постоянните магнити - на ротора.
Двигателите с променлив ток 220 или 380 V се използват за захранване на променлив периодичен ток. Класификацията на тези машини е по-разклонена, отчита честотата на въртене на магнитното поле на статора и ротора, както и фазовата структура на тока.
В първия случай двигателите се разделят на синхронни (скорост на въртене на статорното поле, роторно ниво) и асинхронни (скоростта на ротора е по-малка). По броя на фазите променливотоковите двигатели са еднофазни и многофазни (трифазни).
Класически схеми
издаване на променлив ток на промишлената честота (Hz), започнете да разглеждате връзката на двигателите разумно за тази ситуация.
Класическите варианти са преносни линии от електроцентрали /ТЕС, ТЕЦ, ХЕС, АЕЦ /с крайно напрежение на потребителя 380V (трифазен) или 220V (еднофазен). Първият използвапромишлено оборудване или енергия за битови условия (шлайфане, дървообработване, металорежещи машини и др.). При такава схема електрическите двигатели се свързват правилно със схемата на звезда или триъгълник.
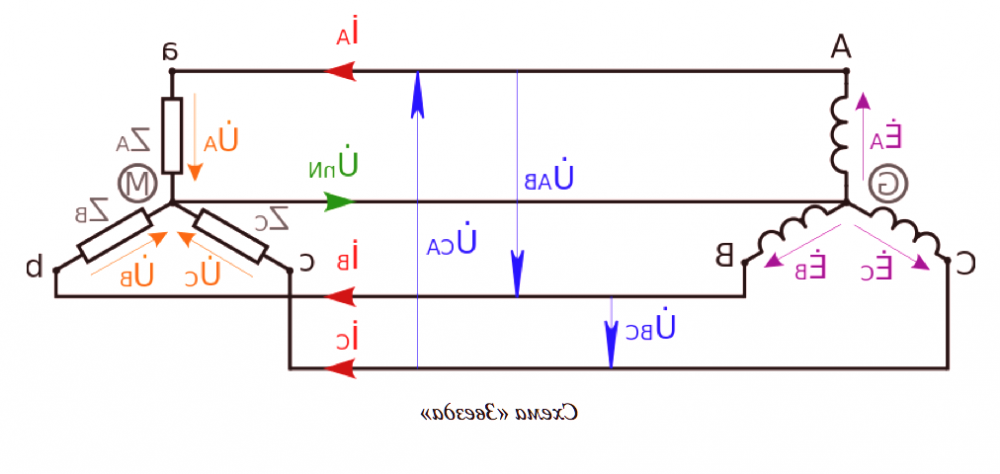
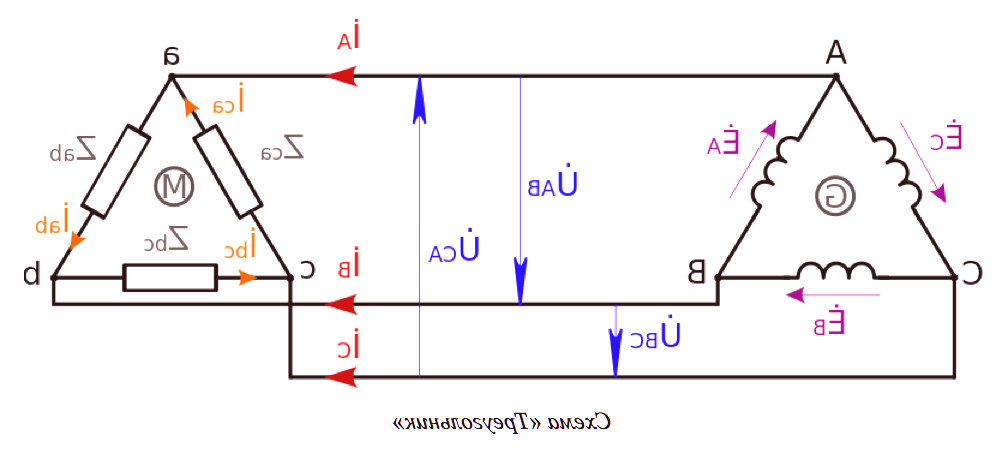
"Star" осигурява плавен старт на двигателя, но постигането на максимална мощност не изгасва. "Триъгълник", напротив, ви позволява да въведете капацитет на паспорта (това е един и половина пъти повече). Пусковите токове могат да причинят повреда на изолацията, особено при мощни двигатели, до 45 киловата.
Изборът на схема за свързване зависи не само от параметрите на мрежата или от мощността на двигателя, но също така и от разположението на клемния блок, характеристиките на стартера. Краката на контактите могат да бъдат изчислени по всяка от веригите или в една от тях, както се вижда от маркировката на характерната плоча.
Еднофазен двигател (220V) от неговия "контрагент" се различава по това, че има в статора си не три, а един работен намотка. В резултат на това няма фазово изместване и стартирането не се случва, когато напрежението е приложено към терминала. Необходими външни намотки - индуктивни (съпротивление) или капацитивни (кондензатори).
Включване на почивката за 380 220
Има и опция, когато има трифазен двигател с мощност 380 V и 45 kW, но мрежата е еднофазна верига (220V). Тук ще трябва да се използва само една фаза и да се използват блокове кондензатори (кондензатори) за пускане и работа.
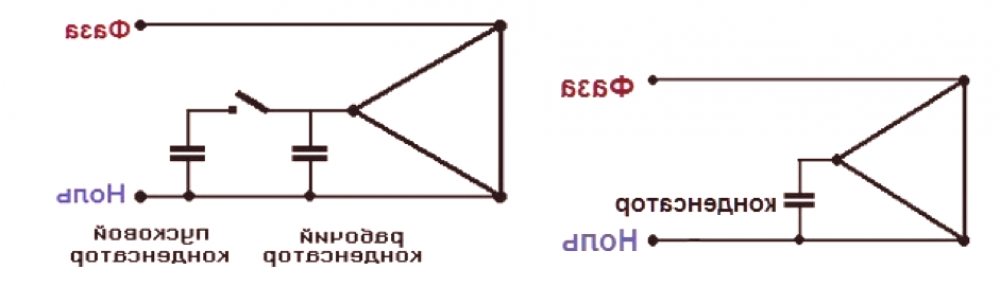
Първата схема е подходяща за двигатели с мощност 220 V, чиято мощност не надвишава 1,5 kW, т.е. тяхната работа започва без товар. В противен случай трябва да го използватепаралелен клон за увеличаване на въртящия момент. Връзката се осъществява чрез двупозиционен превключвател. Ако приложите допълнителен превключвател, който свързва кондензатор към фаза или нула, в зависимост от позицията, можете да подредите стартирането на двигателя на заден ход от прекъсване на 220 V.
Недостатъкът на тази схема, особено за масовия сегмент (до 3 kW), е високата цена на кондензаторите, които освен това се включват само по време на пускането в експлоатация. Целесъобразно е да се използват фазо-изместващи елементи на постоянно действие, например динистори (диоди).
Използване на магнитен стартер
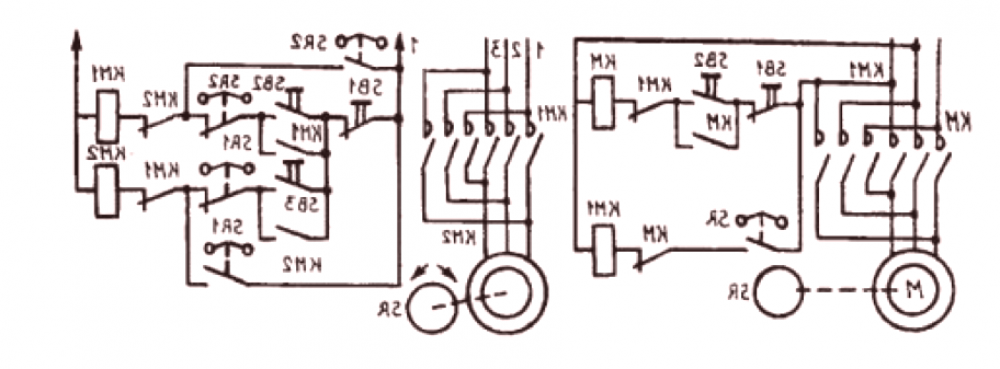
За да може да се осигури непрекъсната работа в единична верига, старт, стоп, режим на заден ход и защита на намотките на двигателя и на самата верига, ще бъде необходимо да се използва превключващо устройство - магнитен стартер. Това е контактор, допълнен от спомагателни механизми, например термично реле. Магнитната намотка на стартера може да има напрежение 220 или 380 V, което ви позволява да захранвате двигателя от мрежа с различни линейни напрежения.
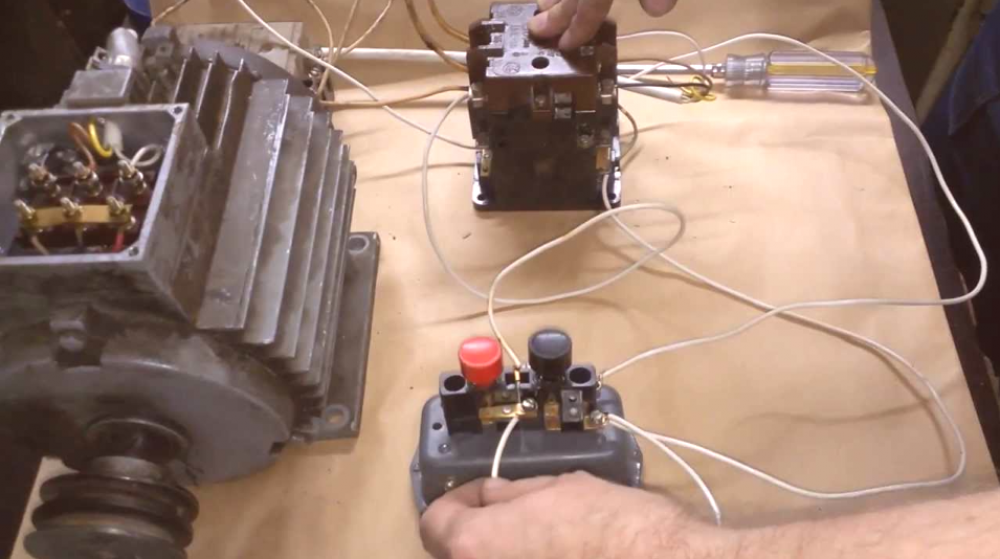
Използване на магнитен стартер
Стартерът може да се използва за организиране на превключването на различни схеми, което е особено полезно при свързване на мощни устройства, например 45 kW двигатели. Основният проблем в този случай е наличието на колосални пускови токове, които могат катастрофално да повлияят на състоянието на намотките. В резултат на това стартерът плавно въвежда двигател с мощност от 45 kW през Star и в подходящия момент превключва намотката към "Триъгълник".
Двигатели с постоянен ток
Принципът на подобнотоЕлектрониката се основава на закона Фарадей за магнитна индукция. В дизайна и схемата на включването на такъв двигател се предвижда наличието на отделни намотки и анкери за възбуждане (IV). Поради тях, напрежение от 220 или 380 V се пропуска отделно. В този случай ролята на ИП е да регулира скоростта на въртене на вала.
Всички съществуващи DPTs са разделени на две големи групи:
- На постоянни магнити. Като правило те имат цилиндрично тяло с анкерна сърцевина. Местоположението на магнитите или статора върху тялото на DPT (радиално, пръстен, тангенциално), ви позволява да го разделите на отделни подвидове;

- Относно електромагнитите. Както е лесно да се отгатне, в този случай ролята на веригата на възбуждане се играе от електромагнит или, по-просто, от намотка.

Външно и конструктивно тези DTT приличат на модели за променлив ток, въпреки факта, че мощността е далеч от 45 kW и повече:
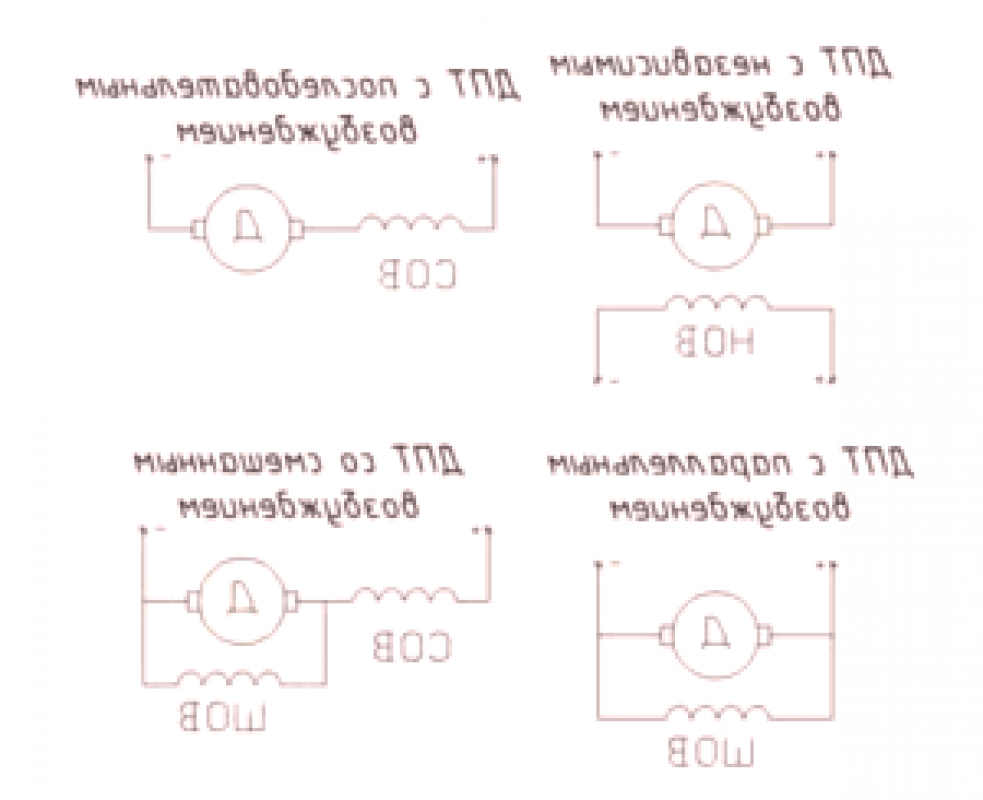 Двигатели за независимо възбуждане. Източникът на стартовия ток е сайт на трета страна, например изправител;
Двигатели за независимо възбуждане. Източникът на стартовия ток е сайт на трета страна, например изправител; Предимството на такива машини е по-компактните размери спрямо аналозите за променлив ток от 220 или 380 волта, лекотарегулиране и изстрелване. Това позволи платформата Arduino да се използва като контролна система, чрез която простите прости схеми за автоматизация могат дори да бъдат отдалечени от програмирането на потребителите.
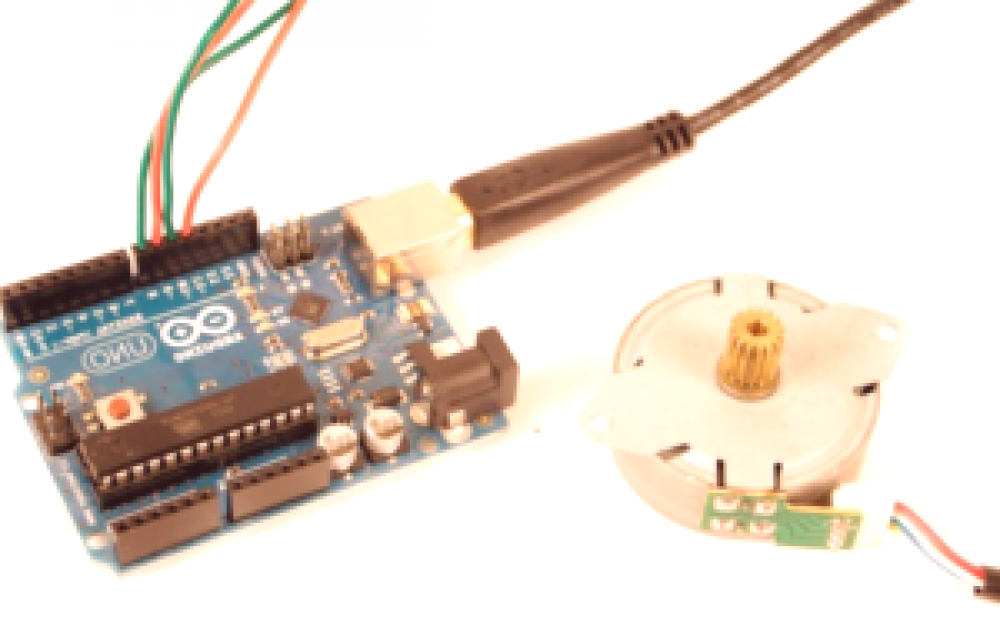
Arduino
Arduino е сложен инструмент за създаване на схеми за управление и се състои от следните части:
- Програмна единица. Средата за разработка на обвивката или фърмуера на Arduino, чрез която програмата се компилира и компилира;
- Хардуерна единица. Това е набор от Arduino PC карти, на които е базирана физическата контролна верига.
Предимството на Arduino е, че системата може да работи офлайн (директно върху обекта за автоматизация) или да се свърже към компютъра чрез USB, Bluetooth, Wi-Fi и др. например домашни експерименти, за да се създаде модел на автомобил със софтуерен контрол. Това означава, че готовият модел ще се движи не под влиянието на дистанционното управление, а поради командите, които са поставени в паметта на блока. Интересен пример е мотор-платформата със сервомотор с постоянен ток и платка Arduino Mega 2560, чиято работа може да се види в следващото видео:
Тип заземяване TN-S
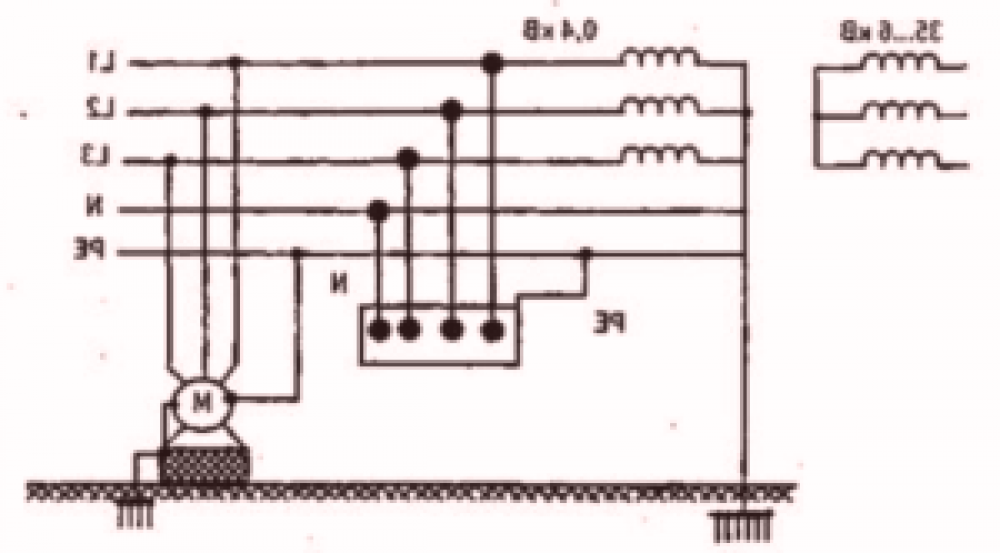 Във всяка насока за системите за електрозахранване се посочва, че електродвигателят трябва да бъде свързан с безопасността на удара. Тази роля се играе от заземяване, класическата схема на формиране на която в Русия е TN C или TN S. S. За двете характерни черти е обединението на неутралния и заземяващия клон. Това еза полагане на трифазна TN C линия при 380V е необходимо да се използва четирижилен кабел (3 фаза и една нула /земя), а за еднофазната 220V е двупроводна (фаза и нула).
Във всяка насока за системите за електрозахранване се посочва, че електродвигателят трябва да бъде свързан с безопасността на удара. Тази роля се играе от заземяване, класическата схема на формиране на която в Русия е TN C или TN S. S. За двете характерни черти е обединението на неутралния и заземяващия клон. Това еза полагане на трифазна TN C линия при 380V е необходимо да се използва четирижилен кабел (3 фаза и една нула /земя), а за еднофазната 220V е двупроводна (фаза и нула).
Днес реалностите постепенно преминават към по-скъпа европейска система TNS, характеризираща се с разделяне на нулеви (N) и заземителни (PE) линии. По-подробно това означава прилагане на трифазни мрежи от петжилни проводници (фази - А, В, С, нула - N и заземяване - PE), а за 220V (еднофазни) - трижилни (A, N, PE). Захранващият проводник в този случай се извежда през линията PE, оставяйки нула TN S безплатно за допълнително оборудване (осветление, уреди и др.).
Въпрос за спиране
Свързването и активирането на двигателя при 220V или трифазен аналог е само един от неговите режими на работа. Друго не по-малко интересно е спирането или спирането. В този случай процесът се съпровожда от превръщането на кинетичната енергия в електрическо поле. Факт е, че ако просто изключите при 45 kW със скорост от 3000 об /мин, то по инерция ще се върти за известно време. Ако имате нужда от "мигновен" стоп, тогава ще трябва да използвате специални схеми за контрол.
На практика се използват четири основни метода на спиране: рекуперативен, реостатен, динамичен и противоположен. Всеки от тях има своите предимства и недостатъци. Например, динамичното спиране се дължи на връзката на статорна бобина с постояннотокова мрежа, която автоматично прави статичното електромагнитно поле вместо да се върти. Това е всичкопозволява регулиране на спирачния момент, но причинява значително отделяне на топлина. Спирането чрез включване се осъществява за сметка на обратната страна на намотките на възбуждане. Резултатът е силен спирачен момент, но също така и повишен риск от повреда поради големи токове. Опционалното спиране не се прилага за високи честоти и капацитети, като например DC.